Generic selectors
Exact matches only
Search in title
Search in content
Post Type Selectors
MENU
MENU
Home
Automatyka
Modele linii produkcyjnych
Oprogramowanie
Stanowiska dydaktyczne
Sterowniki PLC i panele operatorskie
Robotyka
Ramiona robotów
Roboty mobilne
Lidary
Motion capture
Silniki i kontrolery
Kontrolery haptyczne
Teoria sterowania
O nas
Realizacje
Case Studies
Webinary
Artykuły
Wydarzenia
Newsletter
Kontakt
PL
EN
Generic selectors
Exact matches only
Search in title
Search in content
Post Type Selectors
Blog | Wydarzenia
Home
»
Blog | Wydarzenia
»
Strona 4
Interaktywne laboratorium na uczelni – szanse i wyzwania
Szczegóły
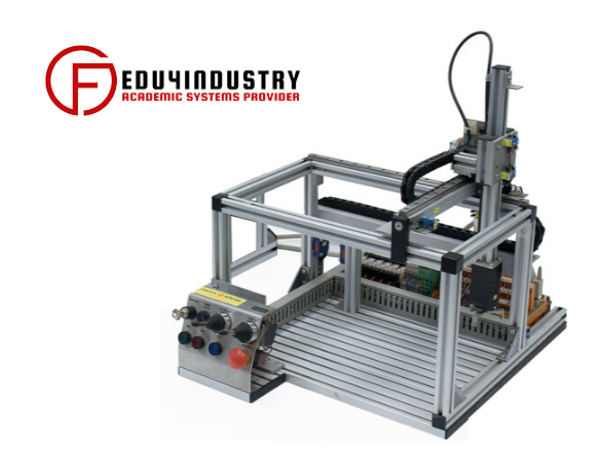
Robot kartezjański – zalety i możliwości zastosowania na uczelni
Szczegóły
Robot badawczy na uczelni – wsparcie dla naukowców i studentów
Szczegóły
Stopnie swobody robota: jego funkcje i zastosowania
Szczegóły
Jakie możliwości zapewnia robotyczne ramię?
Szczegóły
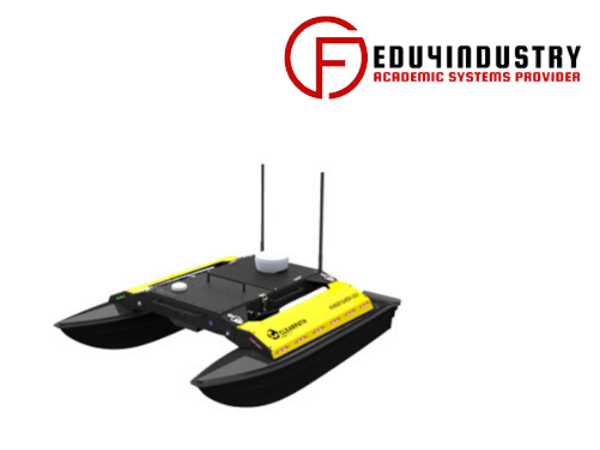
Robot pływający Heron do prac badawczych i naukowych
Szczegóły
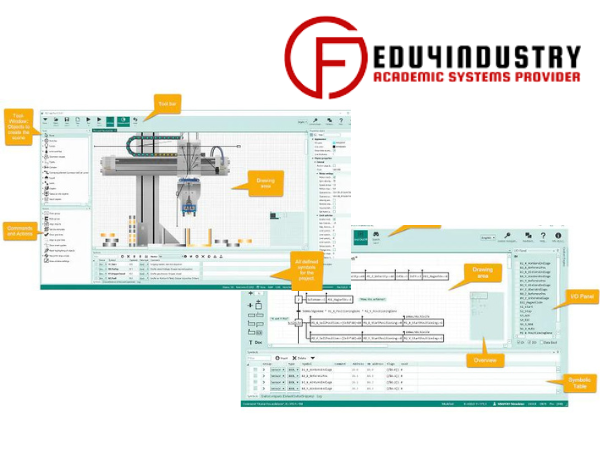
Symulator sterownika PLC: Siemens wspiera naukę automatyki dla początkujących
Szczegóły
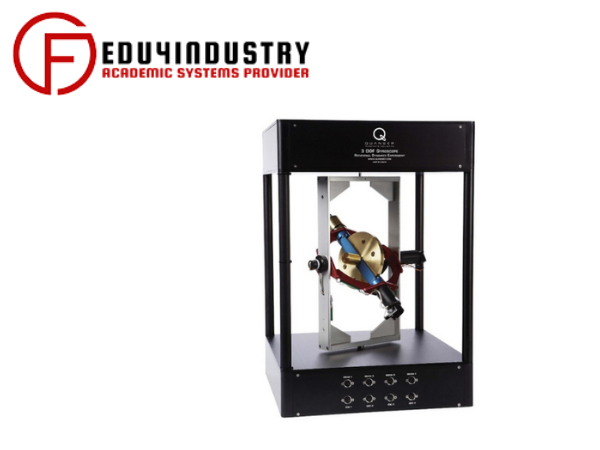
Jakie możliwości zapewnia Quanser? Efekt żyroskopowy
Szczegóły
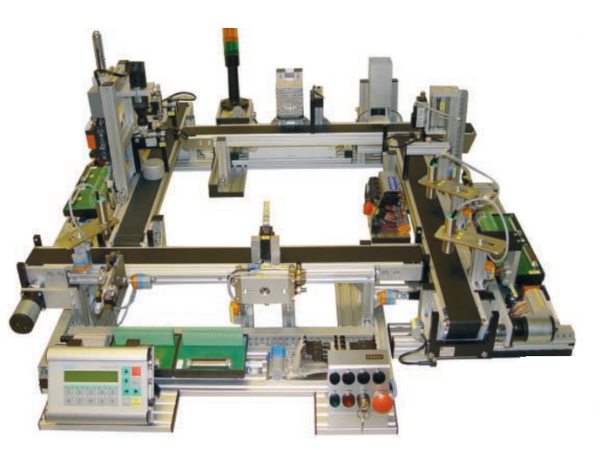
Modele linii produkcyjnych – sposób na ułatwienie nauki automatyzacji
Szczegóły
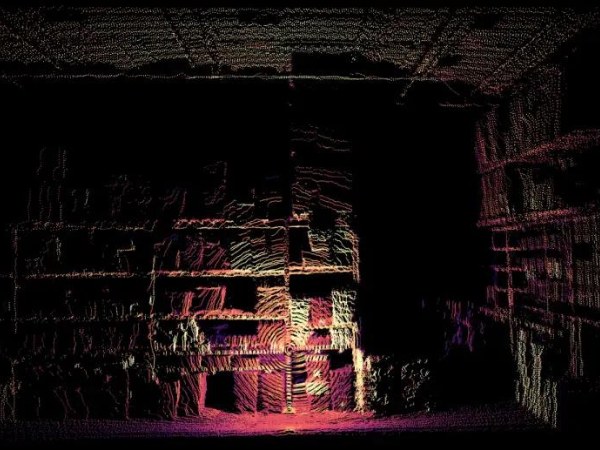
Jak lidary Ouster udoskonalają systemy bezpieczeństwa?
Szczegóły
Husarion robot autonomiczny dopasowany do różnych potrzeb akademickich
Szczegóły
Cyfrowy lidar – udoskonalona technologia oparta na prawie Moore’a
Szczegóły
ROSbot XL – robot mobilny do dydaktyki i badań naukowych
Szczegóły
Ouster OSDome — lidar zapewniający nowe perspektywy
Szczegóły
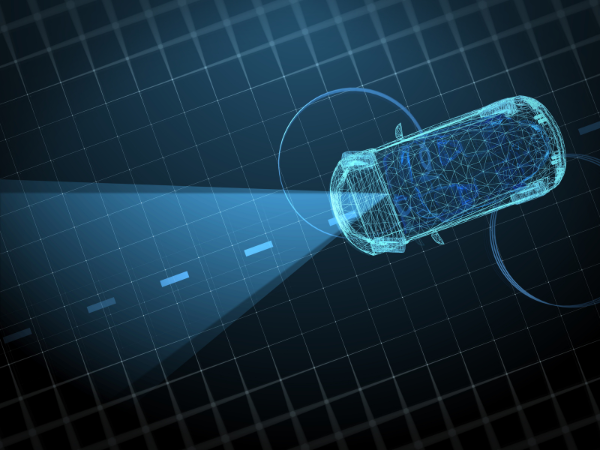
Poziomy autonomiczności pojazdów – jak przygotować inżynierów?
Szczegóły
Budowanie robota: Czujniki dla robotów mobilnych i ramion
Szczegóły
Co zyskasz, wdrażając Universal Robots?
Szczegóły
Budowanie robota: Kontroler robota
Szczegóły
«
1
2
3
4
5
6
…
8
»