
Quanser QArm Research

Quanser QArm Reserach
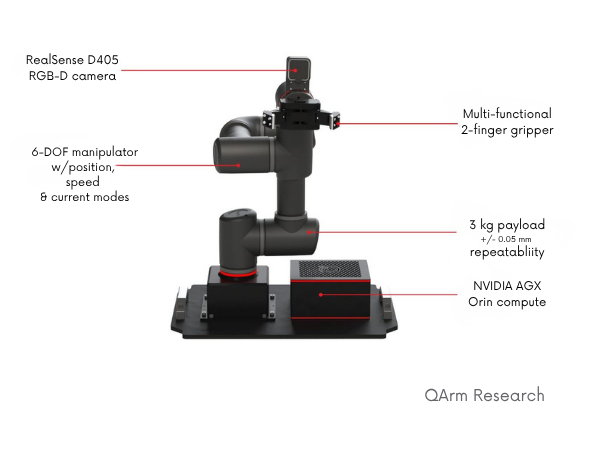
QArm Research to precyzyjne, 6-osiowe ramię robotyczne przeznaczone do zaawansowanych badań oraz kształcenia w zakresie robotyki i mechatroniki. Otwarta architektura, wysoka dokładność i powtarzalność oraz platforma NVIDIA umożliwiają realizację projektów z zakresu sterowania, manipulacji opartej na percepcji, uczenia przez naśladowanie, uczenia ze wzmocnieniem oraz implementacji modeli sztucznej inteligencji.
WYŚLIJ ZAPYTANIE POBIERZ SPECYFIKACJĘ
WYŚLIJ ZAPYTANIE

| ResearchArm – Kluczowe parametry | |
|---|---|
| Układ mechaniczny | |
| Stopnie swobody | 6 DOF robotyczny manipulator szeregowy (J1 Yaw | J2–J4 Pitch | J5 Yaw | J6 Roll) |
| Udźwig | 3 kg |
| Zasięg roboczy | 580 mm |
| Waga | 13.5 kg |
| Powtarzalność | ±0.05 mm |
| Dokładność przegubów | 0.088° |
| Zakres ruchu przegubów | J1, J2, J4, J5, J6: ±360°; J3: ±150° |
| Siłowniki | J1, J2: YM080-230-A099-RH; J3–J6: YM070-210-A099-RH |
| Percepcja i efektor końcowy | |
| Kamera | Intel RealSense D405 |
| Efektor końcowy | RH-P12-RN chwytak robotyczny |
| Rozszerzenia efektora | Zasilanie narzędzi 24V, RS485, wejścia/wyjścia cyfrowe, wejście analogowe |
| Obliczenia i interfejs | |
| Interfejs hosta | Ethernet |
| Platforma obliczeniowa | QBrain – komputer NVIDIA AGX Orin |
| Oprogramowanie i symulacja | |
| Wsparcie programowe | MATLAB/Simulink, Python, ROS 2, C++ |
| Symulacja | NVIDIA Isaac Sim | NVIDIA Isaac Lab |
| Cyfrowy bliźniak | Quanser Interactive Labs |
| Uwagi | |
| *Specyfikacja może ulec zmianie | |
QArm Research to precyzyjne, 6-osiowe ramię robotyczne opracowane z myślą o zaawansowanych badaniach naukowych oraz kształceniu w obszarze robotyki, mechatroniki i automatyki. Platforma umożliwia realizację projektów obejmujących pełny proces rozwoju algorytmów sterowania i manipulacji – od modelowania i symulacji, przez implementację i testowanie, aż po walidację na rzeczywistym obiekcie.
Manipulator charakteryzuje się wysoką dokładnością i powtarzalnością pozycjonowania oraz otwartą architekturą. Wbudowana platforma obliczeniowa NVIDIA zapewnia odpowiednią wydajność do implementacji algorytmów wykorzystujących widzenie maszynowe, przetwarzanie danych z czujników oraz modele sztucznej inteligencji.
QArm Research umożliwia prowadzenie badań i zajęć dydaktycznych z zakresu klasycznych metod sterowania, planowania ruchu, manipulacji opartej na percepcji (Perception-Driven Manipulation), uczenia przez naśladowanie (Imitation Learning), uczenia ze wzmocnieniem (Reinforcement Learning) oraz implementacji i walidacji modeli AI na rzeczywistym manipulatorze.
Dzięki bezpiecznej konstrukcji, bogatemu zestawowi czujników oraz zgodności z popularnymi narzędziami badawczymi platforma stanowi kompletne środowisko do realizacji projektów dydaktycznych, prac badawczych i rozwoju nowoczesnych metod sterowania robotami manipulacyjnymi.
Produkt stanowi także element wyposażenia Quanser Physical Ai Lab oraz Quanser Automation Lab