
Quanser QArm

Quanser QArm Research
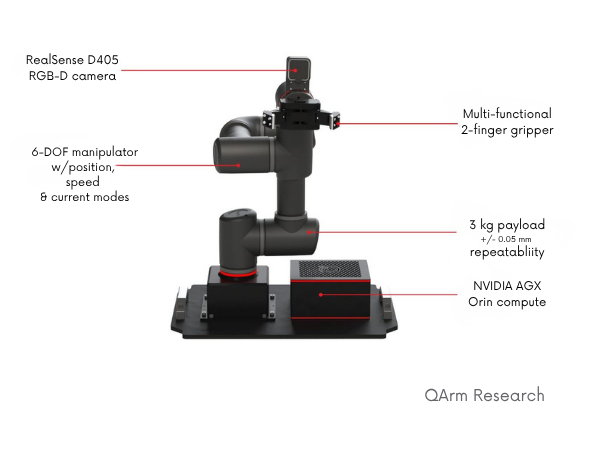
ResearchArm is a precision 6-axis robotic arm designed for advanced research and education in robotics and mechatronics. Its open architecture, high accuracy and repeatability, and NVIDIA-based platform enable projects in control systems, perception-based manipulation, imitation learning, reinforcement learning, and the implementation of artificial intelligence models.
INQUIRY

| ResearchArm – Key Specifications | |
|---|---|
| Mechanical System | |
| Degrees of Freedom | 6 DOF robotic serial manipulator (J1 Yaw | J2–J4 Pitch | J5 Yaw | J6 Roll) |
| Payload | 3 kg |
| Reach | 580 mm |
| Weight | 13.5 kg |
| Repeatability | ±0.05 mm |
| Joint Precision | 0.088° |
| Joint Range | J1, J2, J4, J5, J6: ±360°; J3: ±150° |
| Actuators | J1, J2: YM080-230-A099-RH; J3–J6: YM070-210-A099-RH |
| Perception & End-Effector | |
| Camera | Intel RealSense D405 |
| End-effector | RH-P12-RN robotic hand |
| End-effector Expansion | 24V tool power, RS485, digital I/O, analog input |
| Computing & Interface | |
| Host Interface | Ethernet |
| Compute Platform | QBrain – NVIDIA AGX Orin computer |
| Software & Simulation | |
| Software Support | MATLAB/Simulink, Python, ROS 2, C++ |
| Simulation Support | NVIDIA Isaac Sim | NVIDIA Isaac Lab |
| Digital Twin Support | Quanser Interactive Labs |
| Notes | |
| *Specifications are subject to change without notice | |
ResearchArm is a precision 6-axis robotic arm developed for advanced scientific research and education in robotics, mechatronics, and automation. The platform supports the full development lifecycle of control and manipulation algorithms—from modeling and simulation, through implementation and testing, to validation on a real physical system.
The manipulator is characterized by high positioning accuracy and repeatability, as well as an open architecture. Its integrated NVIDIA computing platform provides the performance required to implement algorithms based on machine vision, sensor data processing, and artificial intelligence models.
ResearchArm enables both research and teaching activities in classical control methods, motion planning, perception-driven manipulation, imitation learning, reinforcement learning, and the implementation and validation of AI models on a real robotic manipulator.
Thanks to its safe mechanical design, rich sensor suite, and compatibility with widely used research tools, the platform provides a complete environment for educational projects, scientific research, and the development of modern robotic manipulation control methods.