Pracownia sterowania haptycznego — WAT
❘ O projekcie
W 2023 roku, Wojskowa Akademia Techniczna zainicjowała ambitny projekt utworzenia Pracowni Sterowania Haptycznego. W ramach projektu, wyposażyliśmy laboratorium w najnowsze technologie tj. system teleoperacji Quanser składający się z manipulatora QArm i urządzenia haptycznego HD2.
„Decyzja o wyborze Edu4Industry jako partnera w realizacji projektu ‘Wyposażenie Pracowni Sterowania Haptycznego’ okazała się strzałem w dziesiątkę”.
Dr inż. Karol Cieślik, opiekun projektu z Wydziału Inżynierii Mechanicznej
❘ Realizacja: kompleksowe wyposażenie stanowiska dydaktyczno-badawczego
Inwestycja zrealizowana dzięki dotacji celowej od Ministerstwa Obrony Narodowej, z łącznym budżetem 629,760 PLN, skupiała się na zakupie zaawansowanej aparatury, pozwalającej na przeprowadzenie badań i szkoleń z zakresu haptycznego sterowania manipulatorami. Umożliwia to realizację zadań manualnych wymagających wysokiej precyzji, takich jak np. praca z materiałami niebezpiecznymi. Dzięki temu projektowi, uczelnia zyskała nowoczesne zaplecze dydaktyczno – badawcze, co znacząco rozszerzyło możliwości procesu kształcenia.
Otwarta architektura rozwiązania pozwala naukowcom na szybkie opracowywanie i wdrażanie nowych aplikacji w telerobotyce, teleobecności, uczeniu maszynowym, robotyce współpracującej itp., przy użyciu środowiska MATLAB/Simulink. W ramach tej współpracy nie tylko zaopatrzyliśmy uczelnię w zaawansowany system teleobecności tj. manipulator z otwartą architekturą systemu sterowania, kontroler z siłowym sprzężeniem zwrotnym oraz system obserwacji i wizualizacji otoczenia, ale również zadbaliśmy kompleksowo o wyposażenie całego operatorskiego stanowiska sterowania.
-

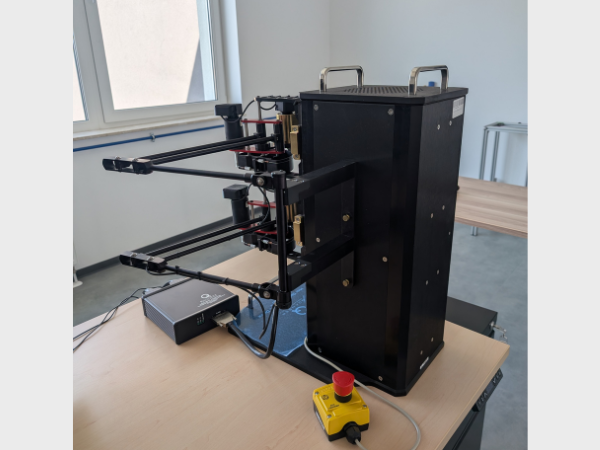
- Manipulator QArm – szeregowa struktura kinematyczna o 4 stopniach swobody.

-
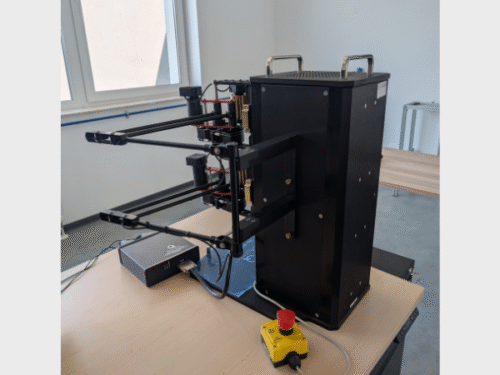

- Kontroler haptyczny o 6 stopniach swobody, w tym 5 definiowanych do siłowego sprzężenia zwrotnego
-
- Stanowisko sterowania umożliwiające pracę w systemie teleoperacji.
❘ Efekt: skuteczne wsparcie kształcenia w sektorze obronności i inżynierii
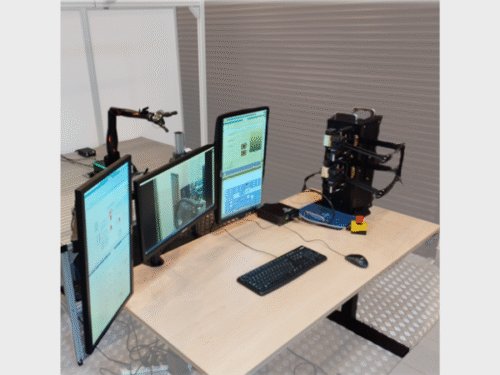
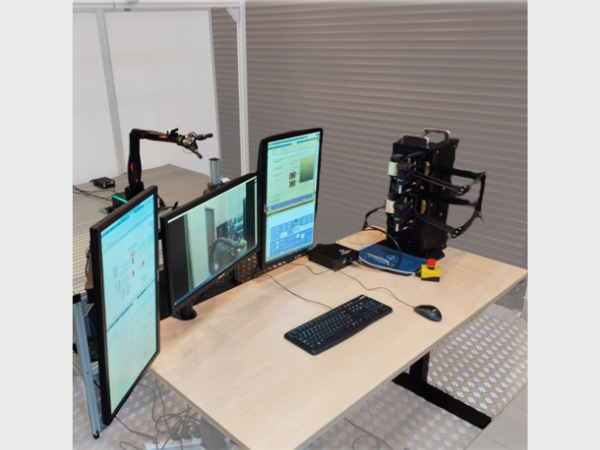
System teleoperacji pozwala na zdalne sterowanie manipulatorem Qarm, odizolowanym od stanowiska operatora. Ruchy ręki operatora — przenoszone przez kontroler haptyczny — są odwzorowywane przez manipulator QArm, co pozwala na precyzyjną i intuicyjną kontrolę położenia i orientacji efektora. System obserwacji umożliwia operatorowi kontrolę otoczenia pracy manipulatora z wykorzystaniem czterech kamer. System wizualizacji otoczenia, stanowi element ergonomicznego stanowiska sterowania, stanowią trzy monitory, na których operator może konfigurować wyświetlany obraz z kamer.
Rozbudowa zaplecza umożliwia realizację bardziej złożonych projektów i badań, co z kolei wpływa na podniesienie kwalifikacji przyszłych inżynierów i operatorów systemów teleoperacyjnych. Nowe wyposażenie umożliwia studentom praktyczne zastosowanie teorii w kontekście sterowania haptycznego i siłowego sprzężenia zwrotnego, przygotowując ich do skomplikowanych wyzwań w sektorach obronności i inżynierii.
❘ Podsumowanie współpracy
Z ramienia uczelni opiekunem projektu jest dr inż. Karol Cieślik – adiunkt w jednostce Wydział Inżynierii Mechanicznej, który tak wypowiedział się na temat naszej realizacji:
„Współpraca z Edu4Industry była wyjątkowo płynna i efektywna od samego początku. Ich zespół profesjonalistów wykazał się nie tylko głęboką wiedzą techniczną, ale także znakomitą umiejętnością słuchania naszych potrzeb i odpowiedniego na nie reagowania. Jesteśmy przekonani, że nasza współpraca z Edu4Industry będzie trwała i owocna również w przyszłości. Wspólnie mamy szansę kontynuować rozwój i innowacje, które są tak ważne dla kształcenia nowych pokoleń inżynierów i technologów.”