HaptionDesktop 3D/6D
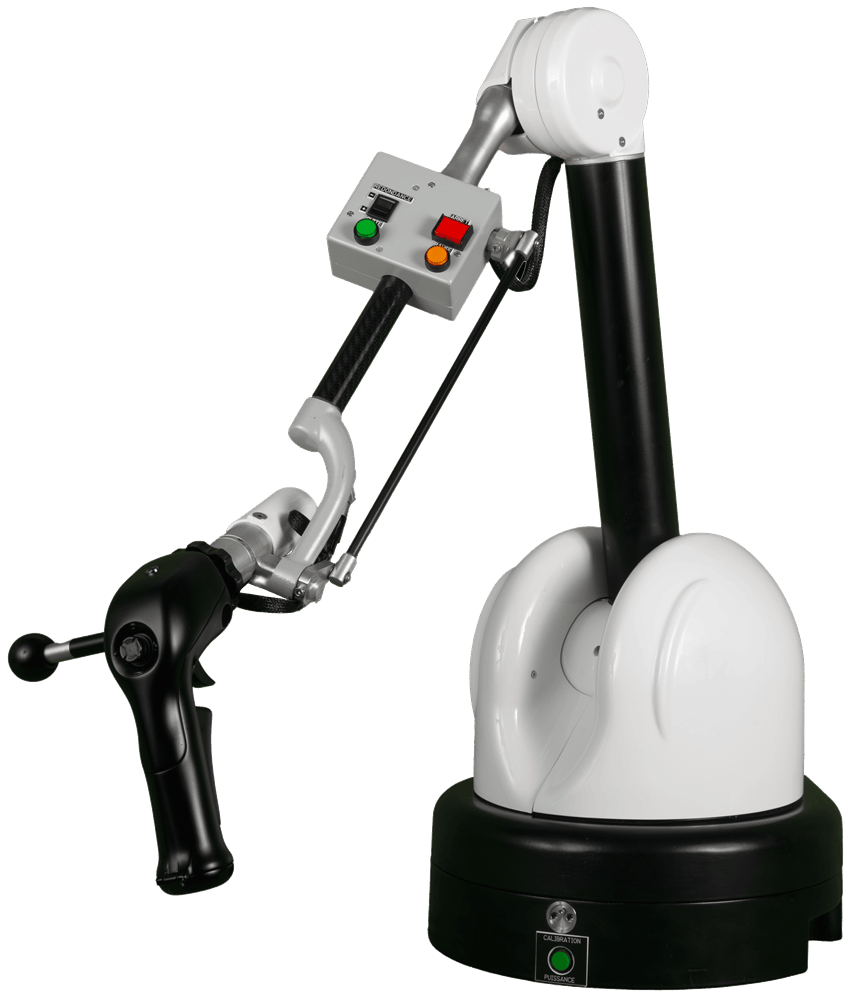
Kontroler haptyczny Virtuose 6D TAO
Przemysłowy kontroler haptyczny do aplikacji robotycznych. To urządzenie z siłowym sprzężeniem zwrotnym zostało opracowane we współpracy z użytkownikami, aby jak najlepiej odpowiedzieć na potrzeby aplikacji w zakresie teleoperacji i zdalnej manipulacji.
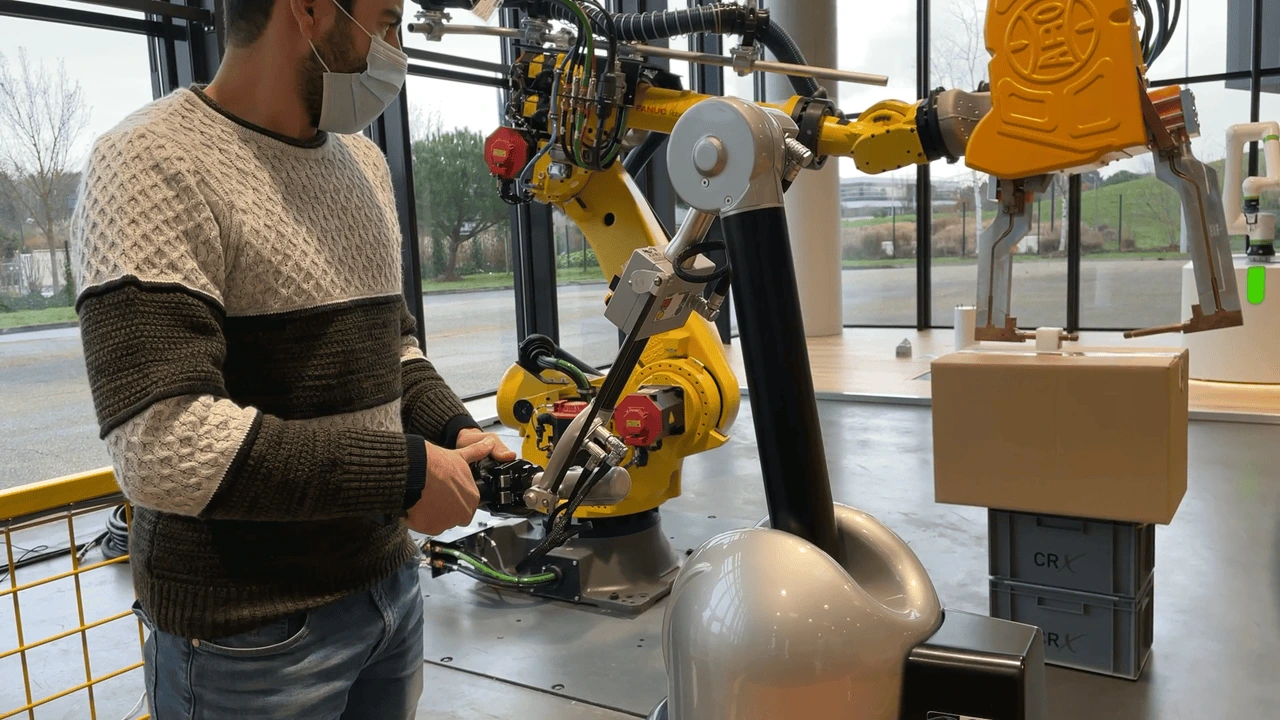
Kontroler Virtuose 6D TAO występuje w wersji standardowej oraz High Force, która zapewnia trzykrotnie wyższy poziom siłowego sprzężenia zwrotnego od opcji podstawowej. Ta dodatkowa moc jest niezbędna do sterowania robotami przemysłowymi. Podstawowa opcja kontrolera Virtuose 6D TAO jest natomiast polecana do sterowania mniejszymi robotami.
WYŚLIJ ZAPYTANIE

Specyfikacja techniczna
TECHNICZNE | VIRTUOSE TAO 6D TAOTM | VIRTUOSE 6D TAOTM HIGH FORCE |
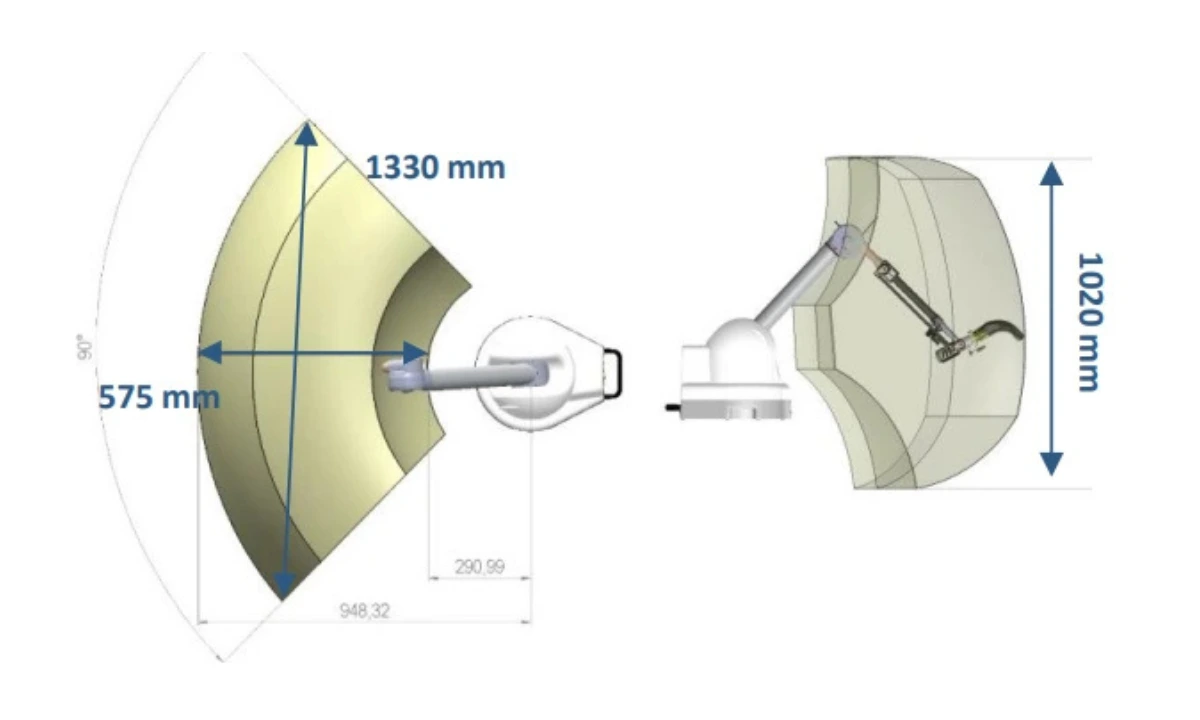
Zakres translacji: | 1330 × 575 × 1020 mm | 1330 x 575 x 1020 mm |
Zakres rotacji: | 330° × 120° × 270° | 330° x 120° x 270° |
Siła translacji (śr./szczytowa): | 10 N / 35 N
| 30 N / 70 N |
Moment obrotowy (śr./szczytowy): | 1.4 Nm / 5 Nm | 1.4 Nm / 5 Nm |
Rozdzielczość pozycjonowania: | 0.013 mm
| 0.013 mm |
Rozdzielczość obrotu: | 0.0018° | 0.0018 ° |
Masa urządzenia: | 12 kg | 12 kg |
ELEKTRYCZNE |
|
|
Zasilanie: | 100–240 V AC, 50/60 Hz (jednofazowe) | 100-240 VAC 50/60Hz (jednofazowe) |
Średnie zużycie energii: | 200 W | 200W |
Maksymalne zużycie energii: | 540 W | 540W |
SOFTWARE I INTEGRACJA |
|
|
Częstotliwość odświeżania: | 1000 Hz | 1000 Hz |
Maks. sztywność translacyjna: | 2000 N/m | 10000 N/m |
Maks. sztywność rotacyjna: | 40 Nm/rad | 40 Nm/rad |
Virtuose 6D TAO jest zbliżony do urządzenia haptycznego Virtuose 6D, i został dostosowany do rynku robotyki i teleoperacji. Wyposażony w dodatkowy panel przycisków, ergonomiczny uchwyt oraz korzysta z protokołu komunikacyjnego Ethernet lub EtherCAT.
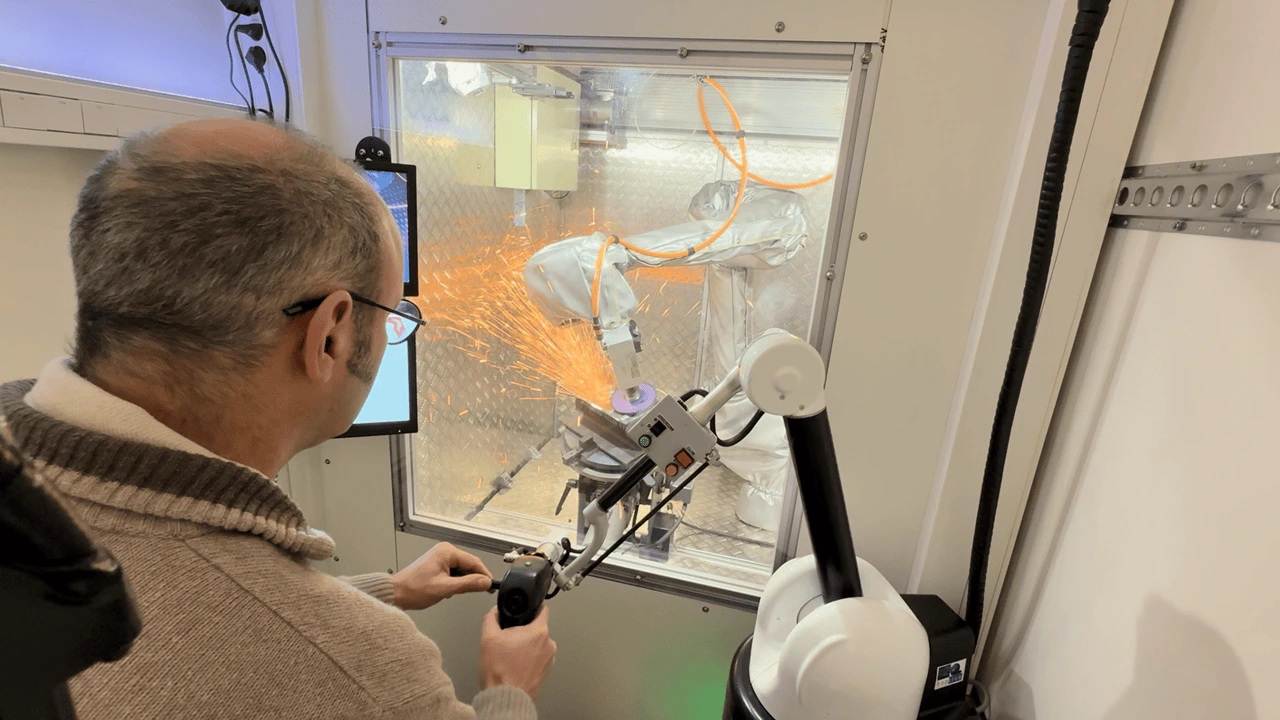
Kontroler jest specjalnie dostosowany do potrzeb aplikacji zdalnej manipulacji: umożliwia bilateralne sterowanie w przestrzeni kartezjańskiej, obsługę jedną lub dwiema rękami, manipulację ciężkimi obiektami oraz symulacje 3D na potrzeby szkoleń i planowania zadań operacyjnych.
Poznaj zastosowania technologii haptycznej: obejrzyj nagranie webinarium.
Sprawdź szczegóły w artykule.