Quanser Flexible Beam
Quanser Flexible Beam
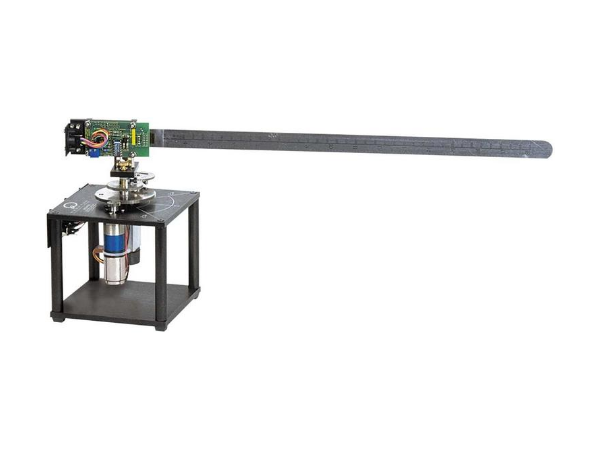
This experiment models the behaviour of a real rigid element, e.g., a robotic arm. This additional module can be mounted on the Rotary Servo Base Unit. It consists of a head with an elastic beam and integrated strain gauge. The goal of the exercise is to control the motor in the base in such a way that after the movement the tip of the beam stops in a fixed position as quickly as possible. Students model this object mathematically and then design algorithms necessary to control it.
The kit includes all the elements needed to quickly start the station: amplifier, controller, Matlab or LabVIEW module as well as educational materials for students.
The product is also available as a virtual version: (click here)
INQUIRY
Your data is the data that allows us to make the first business contact. All data provided in the form are treated as confidential. Personal data appearing in the form will be processed in accordance with our privacy policy, available at www.edu4industry.com.
Basic technical parameters:
- Base parameters:
- High quality servo motor (6V, 1A, 6000 RPM)
- Potentiometer for measuring the position (± 5V)
- Quadrature encoder (4096 pulses / revolution)
- Gears with the possibility of changing the gear ratio
- Comprehensive educational materials compatible with NI LabVIEW and Matlab / Simulink included
- Open architecture allows to create own control algorithms.
- Module parameters:
- Beam length: 419 mm
- Strain gauge factor: 25.4 mm / V